Cavovarus deformity in Charcot-Marie-Tooth disease:
is there a hindfoot equines deformity that needs treatment?
Background
샤코마리투스병(Charcot-Marie-Tooth ,CMT) 은 유전성 운동 감각신경병증(hereditary motor and sensory neuropathy ,HMSN) 또는 비골근육위축으로도 알려져 있으며 가장 흔하게 유전되는 신경질환이다. CMT 1군은 탈수초화, CMT 2군은 축삭의 탈신경화를 보인다.
CMT 환자는 점진적인 근위축과 위약을 보이며 손보다는 발의 변형이 유발되고 근위부부터 진행하는 특징이 있다. 환자는 다양한 족부의 변형을 보이는데, 내반요족(cavovarus) 변형이 가장 흔하게 관찰된다. 내반요족 변형은 후족부의 내반(hindfoot varus), 전족부의 내전(forefoot adduction), 첫번째 중족골의 족저굴곡(1st metatarsal plantar flexion), 요족화(cavus), 갈퀴족(claw toes)을 특징으로 한다. 이는 상대적으로 강한 장비골근(peroneus longus)과 약한 전경골근, 또는 강한 후경골근과 약한 단비골근 사이의 불균형에서 발생하는 것으로, 내반 요족이 동반되거나 감각 소실이 있는 환자는 근위약과 통증성 경결(callosities), 비정상적인 보행과 발목의 불안정성을 경험하게 된다. 약한 전경골근과 강한 장비골근에서 발생하는 불균형은 또한 족하수와 후족부의 첨족 변형을 야기한다. 이러한 모든 증상은 동시에 발생할 수 있으며, 신경이 침범된 위치와 정도에 따라 심하기가 달라진다.
보존적 치료로 호전이 없을 때 수술적 치료가 필요하지만, 기본 치료 방침의 확립된 알고리즘이 없고, 질병의 다양한 양상에 대해 각각의 치료방법이 존재한다. 일반적인 후족부의 첨족변형에 대한 교정적 치료는 아킬레스건 또는 종아리 근육의 연장이다. 그러나 이러한 연장술은 족저굴곡근의 위약을 초래 할 수 있으므로 첨족 변형을 좀더 명확하고 자세하게 분석하는 것이 필요하다. 이를 위해 3 dimensional Plug-in-Gait analysis 나 Heidelberg Foot Measurement Method (HFMM) 들이 사용되고 있다.
이 연구의 목적은 기존의 3 dimensional Plug-in-Gait analysis 과 HFMM 을 사용하여 CMT 환자에서 실제 첨족 변형, 특히 후족부의 첨족 변형과 내반 요족을 평가하고, 첨족 변형과 종아리 근육의 연장술에 있어 가장 적합한 환자를 정립하는데 있어 두 방법을 비교하고자 한다.
Method
환자군(Patient collective)
임상적으로 내반 요족이 있는 CMT 환자 40명(80족) 을 대상으로 하였다. 환자들은 병원에 오기 전에 가족력, 근전도 검사, 유전적 검사를 포함한 임상적, 신경학적 평가를 시행하였다. 남자 19명, 여자 21명 이었으며. 평균 나이는 33.6 ±14.6세(13.5-65.5세)였다.
선정 기준은 CMT 로 진단받고 내반 요족이 있으며, 보조도구 없이 보행이 가능한 환자로 하였다. 이전에 하지 수술의 과거력이 있거나, 발에 궤양이 있거나, 다른 동반 질환 등으로 인해 보행장애가 있는 환자는 제외하였다. 13명(26족) 의 증상이 없는 건강한 지원자들을 대조군으로 삼았으며, 이들의 평균 나이는 43.9±10.8세, 남자7, 여자 6명이었다.
보행평가(Instrumented gait analysis)
모든 환자들은 기본적인 임상적 평가 이후에 운동분석장비<motion capture system (Vicon®, Oxford Metrics,UK)> 을 이용한 기존의 3 dimensional Plug-in-Gait analysis 를 시행하였다. 피부 부착형 마커를 표준화된 절차에 따라 환자의 bony landmark에 부착하였다. Kinematics는 표준화된 소프트웨어를 사용하여 분석하였다.
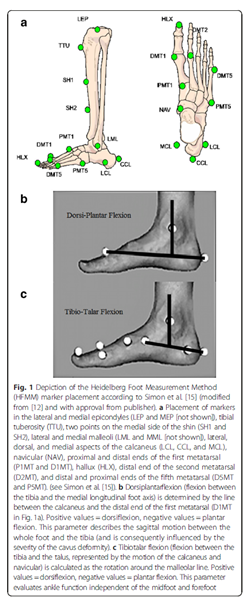
한편, HFMM 방법을 적용하기 위해 17개의 반사 마커를 하지와 발의 bony landmark에 부착하였다. (그림 1a) 종골의 마커부착을 표준화하기 위해 Heel alignment device(HAD) 를 사용하였다. 마커는 경골에 대한 시상면에서 후족부의 움직임(tibio-talar dorsi-flexion,TTDF) 에 대한 평가를 위해 종골과 주상골에 부착되었다. . (그림 1a,c). 또한 Dorsiplantar flexion의 평가를 위해 첫번째, 두번째, 다섯번째 중족골의 머리부분과 경골에 마커를 부착하였다.(그림 1a,b)
마커를 부착한후, 환자군과 대조군은 맨발로 7m walkway 를 따라 걷도록 하였다. Kinematics 는 Matlab® 소프트웨어를 사용하여 계산하였으며 평균과 표준편차를 구하였다.
결과분석(Data analysis)
실제 후족부의 첨족변형이 있는지 확인하기 위해 conventional Plug-in-Gait analysis 와 HFMM 에서 세개의 서로 다른 측정치를 선택하였다. :
1. Conventional Plug-in-Gait analysis 에서 DPF - 경골과 전체 족부 사이의 시상면의 움직임을 평가, 요족 변형의 확장으로 영향을 받을 수 있는 요소
2. HFMM에서 TTDF - 경골에 대한 후족부의 움직임을 시상면에서 관찰
3. HGMM에서 MMA - medial arch angle, longitudinal medial arch, 요족의 정도를 정량적 측정
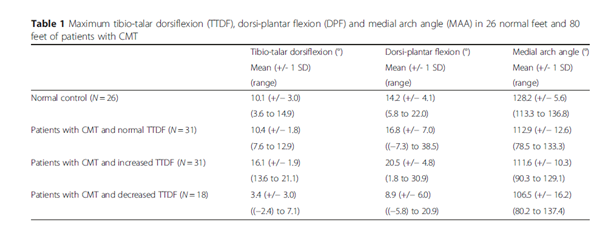
각 발의 입각기 동안 TTDF, DPF, MAA 의 최고치를 측정하고, 80걸음의 평균과 표준 편차를 측정하여 대조군과 비교하였다. CMT 환자들의 TTDF 는 대조군의 평균과 표준편차를 기준으로 비교하여 증가된 TTDF(대조군의 평균보다 1SD 초과), 정상 TTDF(대조군의 평균의 1SD 범위), 감소된 TTDF(대조군의 평균보다 1SD 미만) 로 나누었다 (표 1)
Result
표 1에서 26개 대조군의 족부와 80개 CMT와 내반 요족이 동반된 족부의 TTDF 와 DPF, MMA 사이의 관계를 보여주고 있다. DPF ROM 이 TTDF ROM 보다 모든 군에서 증가되어 있었다. 또한 요족의 요소가 MMA 값의 감소와 관련이 있음을 보여준다. CMT 군에서 18개의 족부(22.5%) 만이 감소된 TTDF 를 보였으며, 31개의 족부(38.75%) 는 정상 TTDF 를, 다른 31개의 족부(38.75) 는 대조군과 비교하여 증가된 TTDF 를 보였다.
80개의 족부를 대상으로 우측과 좌측에서 TTDF 와 DPF 사이에 피어슨 상관관계 분석을 시행하였다. 감소된 TTDF 군에서는 상관계수 R=0.755(p<0.001) ( Left side: R = 0.791, Right side: R =0.770) 로 강한 상관관계를 보였으나, 정상 TTDF 와 증가된 TTDF 군에서는 각각 R=-0.118(Left side: R = 0.230, Right side: R = −0.397), R=0.078(Left side: R = 0.185, Right side: R = 0.070)로 약한 상관관계를 보였다. 또한 감소된 TTDF 군에서 MMA 와 비교하였을 때 약중(weak to moderate) 의 상관 관계를 보였다(R=0.335) (Left side: R = 0.249, Right side: R = 0.387). 그러나 MMA 와 DPF 사이에서는 상관관계가 없었다 (R=0.023) (Left side: R = −0.089, Right side: R = 0.132).
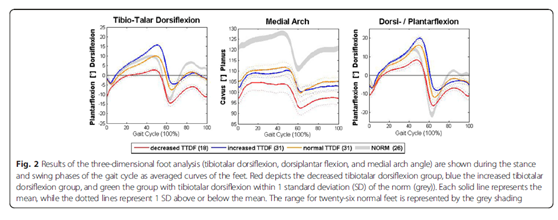
그림 2는 세 군에서 전체 보행주기 동안의 TTDF, DPF 움직임과 MMA 의 변화를 그래프로 표현한 것이다. 감소된 TTDF 군은 TTDF, DPF, MMA 에서 모두 대조군보다 낮은 값을 보였다. 정상 TTDF 군은 전유각기를 제외한 보행주기 동안 감소된 DPF 값을 보였다. 감소된 TTDF 군은 정상 또는 증가된 TTDF 군에 비하여 감소된 MAA (요족이 증가된 것을 의미) 를 보였다.
Discussion
이 연구의 목적은 실제 후족부의 첨족변형을 확인하고 치료를 좀더 적절하게 적용하고자 기존의 고식적인 족부의 움직임 뿐만 아니라 특수한 시상면의 후족부 운동학 분석을 통하여 정확하고 특수하게 내반 요족 변형이 있는 CMT 환자의 족부 운동학을 규명하는 것이다.
3차원 HFMM 은 후족부의 움직임을 전족부와 경골의 전반적임 움직임으로부터 독립적으로 분리, 규명, 측정할 수 있도록 하였다. 피험자들 중 22.5% 만이 입각기시 감소된 TTDF 와 종아리 근의 단축으로 후족부의 첨족 변형이 되었다. Conventional Plug-in-Gait analysis 는 전족부와 중족부로부터 후족부의 움직임을 분리하지 못하여 요족 변형의 후족부 첨족 요소를 규명하지 못하였다. HFMM은 Conventional Plug-in-Gait analysis와 달리 분절적 변형을 규명하고 첨족 변형의 다양한 정도에 따라 구별하여 정의하는데 사용의 이점이 있다. 심한 요족 변형의 경우 Conventional Plug-in-Gait analysis 에서 감소된 DPF 를 보였으나, HFMM 으로 평가 했을 때는 경한 첨족 변형이거나 첨족 변형이 없기도 하였다. Conventional Plug-in-Gait analysis는 분석범위에 제한이 있고, 감소된 DPF 가 요족 또는 후족부의 첨족 변형의 결과인 경우는 해당되지 않는다. 결국, Conventional Plug-in-Gait analysis는 치료에 관련된 결정을 위한 보행 분석 도구로 사용되기에는 제한점이 있다. Conventional Plug-in-Gait analysis 만으로 분석을 한다면 위와 같은 환자에서 첨족 변형에 대해 필요치 않은 종아리 근육 또는 아킬레스건의 연장술을 시행할 위험이 높아지고, 결국 근육의 불균형을 더욱 초래 할 수 있다. 실제 후족부의 첨족변형이 있는 경우, 아킬레스건 또는 종아리 근육의 연장술은 치료 방법이 된다. 그러나 아킬레스건 연장술은 족저굴곡근의 위약을 초래하고 영구한 장애를 일으킬 수 있다. 결국 족저굴곡근의 위약이 있는 환자에서 이러한 수술은 매우 조심스럽고 선택적으로 이루어 져야 한다.
이 연구의 제한점은 종골의 neutral position 을 측정하는데 있어 정확한 측정 방법이 부족했다는 것이다. 또한 뒤꿈치 부위의 피부 및 피하조직등으로 해부학적으로 정확한 마커의 배치가 이루어 지지 못했다. 추후에 방사선적인 검사와 연계하여 더욱 정확한 측정이 필요하겠다. 또한 보행이 가능한 CMT 환자만을 대상으로 하였기 때문에 상대적으로 보행이 불가능한, 즉 심한 CMT 환자는 포함 시키지 못하였다.
Conclusions
Conventional Plug-in-Gait analysis 는 복합적인 족부의 변형과 후족부의 움직임에 대한 효과를 기술하는데 한계가 있다. HFMM 을 사용한 전족부와 후족부의 분절적 평가는 내반요족이 동반된 CMT 환자들에게 있어 가장 적절하고 효과적인 수술적 교정을 계획하는데 있어 중요한 정보를 제공하므로 실제 첨족 변형의 측정에 도움이 된다. CMT 환자의 일부만이(이번 연구에서는 22.5%) 실제 후족부의 첨족 변형이 있으므로 아킬레스 건 또는 종아리 근육의 연장술을 고려할때에 정확한 측정 및 평가가 필요하다.