Therapeutic effect of gait training with
two types of ankle-foot orthoses on the gait of the stroke patients in the
recovery phase
2가지 타입의 AFO를
이용한 보행 훈련이 회복기 뇌졸중 환자의 보행에 미치는 치료 효과
Aliyeh Daryabor, Sumiko Yamamoto, Naoyuki
Motojima, Souji Tanaka
Turk J Phys Med Rehabil. 2022 Jun
1;68(2):175-183. doi: 10.5606/tftrd.2022.7866.
서론
뇌졸중은 저하된 보행 속도, 족하수,
비대칭 보행, 증가된 에너지 소비, 그리고 부적절한
근육 활성도와 같은 보행 장애를 유발한다. 반신 마비를 보이는 뇌졸중 환자에서 보행 능력을 회복하는
것은 무엇보다 중요한 재활치료의 목적이다. 뇌졸중 발병 후 첫 3개월에
운동 기능이 가장 많이 회복되고 6~12개월 기간 동안 점진적인 회복을 보이는데 급성기와 아급성기에
재활 치료를 집중적으로 시행하는 것이 중요하다. 아급성기 내에
ankle-foot orthosis (AFO)를 착용하고 보행 치료를 받는 것이 보행 기능을 향상시키는데 중요하며 이러한 효과를 “orthotic effect” 라 한다. Functional
Electrical Stimulation (FES) 도 보행시 치료 효과를 보였다. Everaert
등의 연구에 의하면 rigid AFO보다 FES가
보행 치료 효과가 더 좋다고 발표하였는데 이는 conventional AFO가 발목 움직임을 제한했기
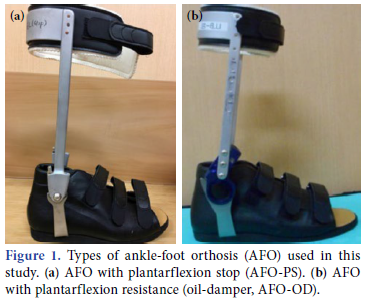
때문이다. Conventional AFO는 관절이 있는 것과 없는 것으로 분류되는데 둘 다 입각기에
발목을 안정화시키고, 유각기에 클리어런스를 좋게하는 효과를 보이나 기능적으로는 움직임을 제한하는 면이
있다. 하지만 oil damper AFO(AFO-OD)는
발목의 족굴은 제한하고 배굴은 자유롭게 움직임이 가능한 형태로 파일럿 연구에서 좋은 치료 효과를 보였다.
이 연구는 AFO-OD와 AFO-PS
각각을 착용한 보행 치료 효과를 비교하여 어떤 AFO가 더 치료효과가 좋은지를 알아보기
위한 것이다.
연구
대상 및 방법
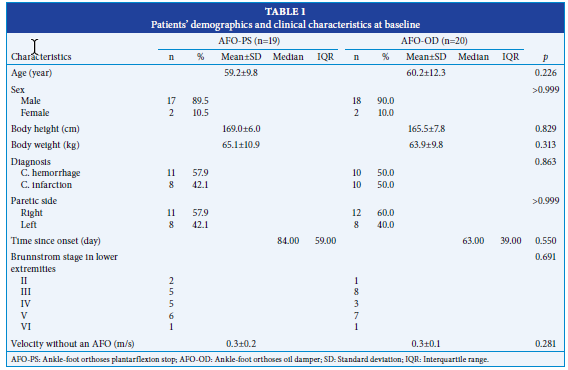
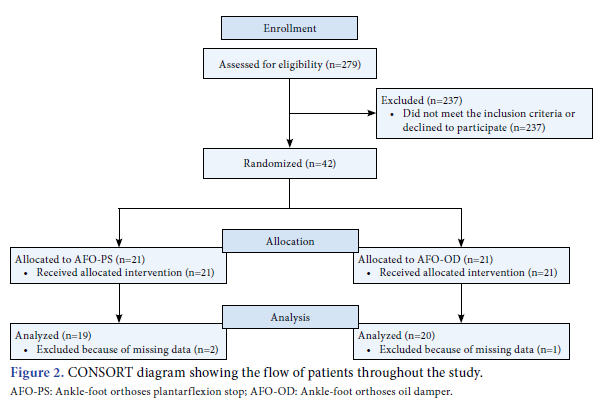
14명의 AFO-OD group과 15명의 AFO-PS group 환자들이 2주 동안 치료사로부터 매일 1시간씩
보행 치료를 받았으며, 치료 전과 치료 후 보조기를 착용하지 않은 상태로 보행의 각 자료들을
체크하고 비교하였다. 보행의 자료는 six AMTI
force plates (Advanced Mechanical Technology Inc.,
Watertown, MA, USA) 와 10-camera
Vicon motion analysis system (Vicon Motion Systems Ltd.,
Oxford, United Kingdom )으로 기록하였다.
결과
두 그룹 모두에서 치료 후 입각기 동안 spatiotemporal factors, ankle
joint moments, ankle power
generation, shank-to-vertical angle, and center of
gravity velocity 가 호전되었고, pre-swing knee
angular velocity 와 hip flexion
moment in pre-swing에서 호전 변화를 보였으나 그룹간 차이는
보이지 않았다. .
결론
두 타입의 AFO 모두 뇌졸중 환자의 보행 치료에 효과를 보였으나 그룹간 차이는 보이지 않았
는데 향후 AFO 착용하지 않고 보행 치료를 받은 대조군과 치료 효과를 비교하는 연구가
필요하겠다.