Textured Foot Orthotics on Dynamic Stability and Turning Performance in Parkinson’s Disease
파킨슨 환자에서 질감을 살린 발 보조기가 동적 균형과 회전 동작에 미치는 영향
Kelly A. Robb and Stephen D. Perry
Journal of Motor Behavior. https://doi.org/10.1080/00222895.2019.1639609
서론
파킨슨병(PD)은 퇴행성 신경질환으로 서동증, 떨림, 보행 정지와 같은 운동 증상이 동반되며, 이는 낙상에 대한 두려움을 크게 증가시키고 삶의 질을 감소시킨다. 경중증도의 파킨슨 환자에서 mediolateral(ML) sway path length와 range가 증가하고 이는 파킨슨 환자의 낙상의 위험을 증가 시킨다. 이전 연구들은 정적인 상태에서 이루어졌고, 동적인 상태에서 center of mass (COM)-base of support (BOS) 와 center of mass (COM)-center of pressure (COP) 관한 연구는 불명확한 상황이다. 파킨슨 환자에서 보행 속도와 회전 보행 수, stability margin 을 조사하는 것이 균형 평가와 치료 효과를 파악하는데 도움을 될 것이다. 발바닥의 기계감각수용체를 자극하는 것은 감각 저하로 균형 감각이 떨어지는 파킨슨 환자에서 체성감각시스템을 변화 시켜 보상적 움직임과 대응 능력을 향상시킬 수 있다. 질감을 살린 깔창은 감각 피드백을 향상시킬 것이다. 텍스처가 보강된 보조기를 사용해서 균형 및 보행 매개 변수 개선을 알아본 연구는 없었다. 보행 속도, 스텝 폭, 스텝 길이, 턴 스텝 카운트, ML COM-BOS 관계를 신발만 신고(F), 질감이 없는 깔창을 신고(FO), 질감이 깔창을 신고(FOT) 세가지 조건에서 조사를 하였다.
방법
연구대상자
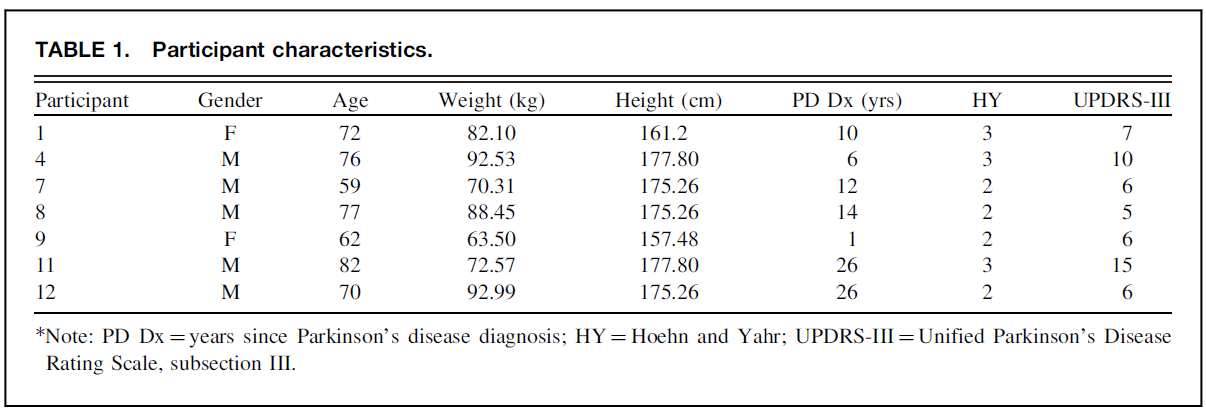
장비
Kinematic data는 3개의 force plates로 측정되었고(AMTI; Watertown, Massachusetts, USA),
Optotrak motion capture system (Northern Digital Inc., Waterloo, ON, CAN)의 12개의 IRED markers들을 양측 3rd metatarsals, ankles, knees, hips, shoulders, forehead, 그리고 xyphoid process 위치시켰다.
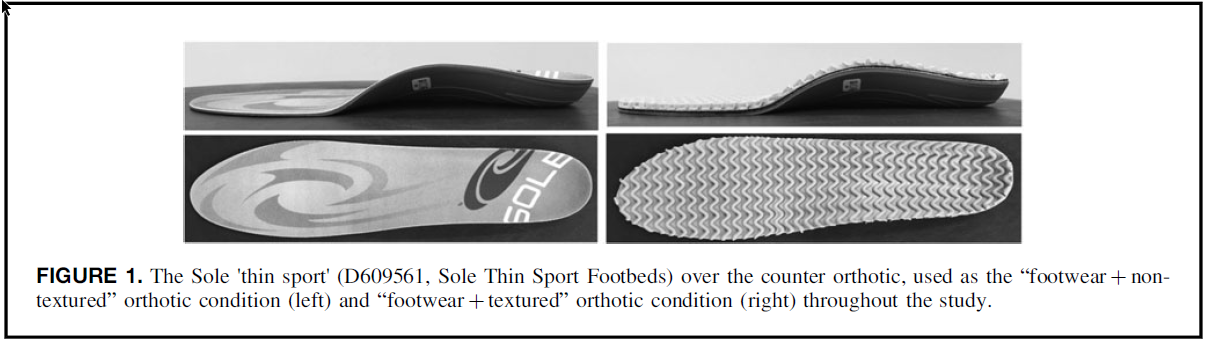
The SoleTM ‘thin sport’ orthotic (D609561, Edge Marketing Corp; Calgary, AB, CAN) 가 FO 와 FOT conditions에 사용되었다. Silicone rubber (Smooth-Sil 950 Series) cover 가 sole orthotic (Figure 1)으로 사용되었고, 모든 참가자는 Thin socks, with minimal seams (76% polyester, 22% olefine, and 2% rubber; ATW3202-014/M/TO2/ P10/S04, Athletic Works, Wal-Mart Canada Corp.)을 신었다.
프로토콜
F(신발만 착용) and FO(질감 없는 깔창을 착용)을 baseline으로 검사하고 FO(질감 없는 깔창 착용) and FOT(질감 있는 깔창 착용)을 4주째와 5주째에 검사함. Monofilament testing을 매번 시행하여 참가자들의 감각 역치가 연구기간동안 일정한지를 확인하였다. 약물 복용 이력, 깔창의 편안한 정도, 착용 시간, 낙상 여부를 조사하고, 매 테스트 시 참여자가 원하는 속도로 180도 회전을 포함하여 10회를 걷도록 하였고 static stance시에는 한발이 footplate 위에 위치하도록 하였다.
통계 분석
보행 속도와 동적 균형 측정은 braking step의 single stance phase 때 분석하였다. 회전 동작 전의 마지막 스텝인 braking step은 회전 동작을 분석하는데 중요하다. Center of mass(COM) velocity, Transverse plane location of the COM 그리고 Lateral border of the base of support (BOS)를 각각 측정하였다. 최종 값은 COM-BOS ML maximum, minimum, range으로 조사를 하였다.
One-way repeated measures analysis of variance (ANOVA) using SAS statistical software version 9.2을 사용하여 dynamic balance와 gait parameter variables 분석하였고, inter-subject variability 와 trial variability를 확인하였다. Acute vs long-term FO wear, acute vs long-term FOT wear, baseline (footwear only) vs long-term FOT wear 값을 비교하였고, p<0.05 통계학적 유의한 값으로 정의하였다.
결과
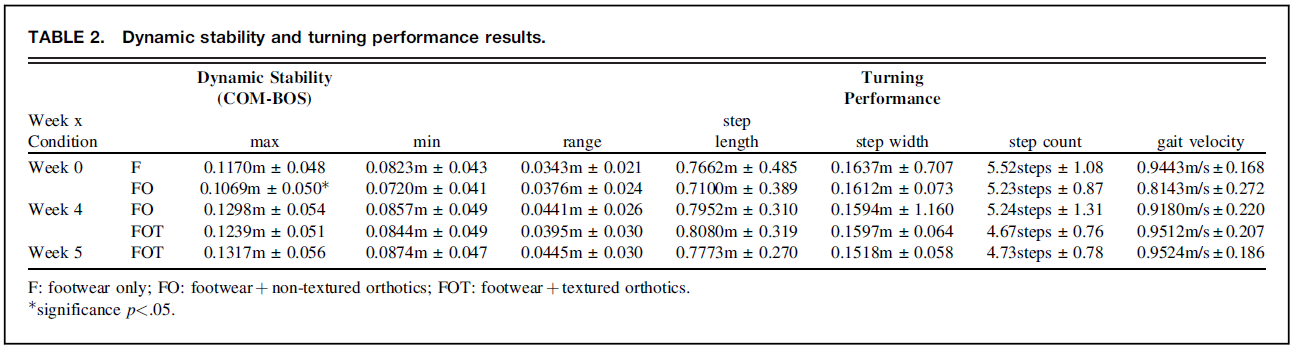
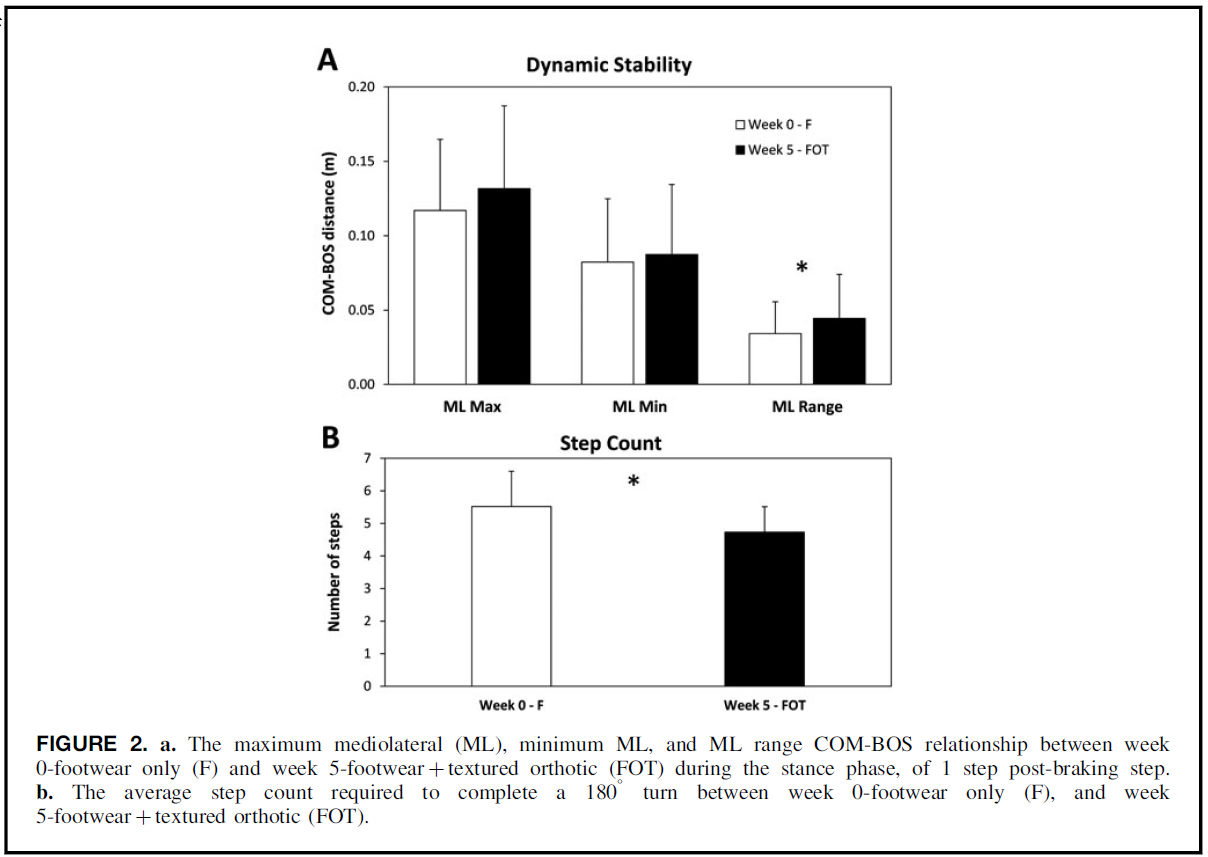
Acute foot orthotics 의 결과는 유의한 Maximum ML COM-BOS감소, 유의하지 않은 Minimum ML COM-BOS 감소, 유의하지 않은 ML Range COM-BOS 증가가 관찰되었는데 이는 불안전성의 증가를 의미하고 발보조기를 착용하지 않았던 파킨슨 환자들은 초기 적응기간동안 불안정성이 증가할 수 있다는 것을 의미한다. Long-term foot orthotics의 결과는 질감이 있는 깔창을 착용한 환자에서 유의한 ML Range COM-BOS의 증가와 회전 동작에서 step number 의 감소를 관찰하였다.
토론
파키슨 환자가 깔창 발보조기를 착용함으로써 신경근보상 반응을 활성화시키는데 급성기에는 불안정성이 오히려 증가되나 착용기간이 길어지면 신경근보상 변화를 적응시키면서 안정화되는데 질감있는 깔창이 감각신경시스템을 자극하여 동적 균형을 안정화시키는 운동 기능을 더 활성화 시키는 것으로 생각된다.