Claw Toe: Individuals
with chronic ankle instability exhibit altered ankle kinematics and
neuromuscular control compared to copers during inversion single leg landing
Takaya Watabe 1,
Tomoya Takabayashi 2, Yuta Tokunaga 3, Masayoshi Kubo 4
Phys Ther Sport. 2021 May;49:77-82.
목적: 정상착지와 inversion single leg착지시, 만성 발목 불안정성(CAI),
coper 및 대조군의 발목 운동학 및 근육 활동을 비교해본다.
방법: CAI성인(N =
12); copers(N = 12) 및 대조군(N =
12), 총 3 그룹.
정상착지와 inversion single leg착지시, tibialis anterior, medial gastrocnemius, fibularis
longus (FL) 3개의 근육
activity를
착지 전후
200ms 동안
기록하였다. 또한, FL latency, sagittal and frontal co-contraction indexes (CCI),
ankle inversion angle at the initial contact, maximum inversion angle 또한 기록하였다.
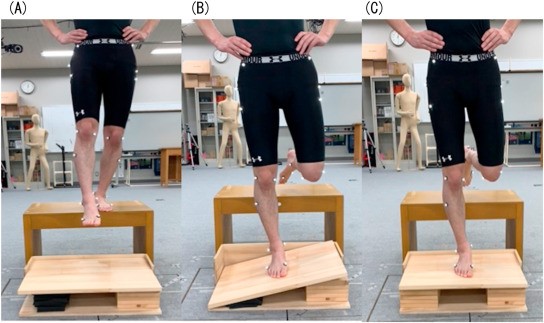
Fig. Inverted (B) and flat (C) platforms that utilized a
platform arrangement to simulate lateral ankle sprain during a single leg
drop-landing. (A) Starting position, (B) inversion landing tasks, and (C)
normal landing tasks.
결과:
CAI 그룹은
coper 및 control 그룹과 비교하여 inversion single-leg 착지동안 유의하게 긴 FL 잠복기, 감소된 FL 근육 활동, 정면 CCI
및 착지 후 maximum
inversion angle증가가 발견되었습니다. 그러나 정상 착지 시 CAI와 coper 그룹 간에는 유의한 차이가 관찰되지 않았다.
결론:
이러한 결과는 FL 잠복기가 연장되고 ankle
kinematics가 변경되었음을 시사하는 것으로, inversion
single-leg 착지시 CAI에서 발목염좌가 반복될수 있다는 것을 시사한다.
Comment
: Chronic
ankle instability환자에서 inversion single
leg착지시 fibularis longus
latency지연이 확인되었다.
또한 copers군(ankle inversion injury후
회복되고 극복된
군) 또는
control군에 비해 CAI군에서, ankle inversion각도가 더욱 증가함이
관찰되었다. 그러나 normal single leg착지시, CAI와 copers간 어떠한
차이도 없었다.
결국 uneven surface, 특히
inversion landing task시 염좌는 반복될 수 있는데, 이를 극복하기위해서는 PL 근육의 neuromuscular control이
무엇보다 강조 되어야하겠다.